My last post was from January and not much has happened since then – at least not much on R3-B9. One the essential features is, of course, the sound. I had played with an SD card reader module for Arduino and also with a micro SD card reader like this one.
 While I was able to read a text file from the SD card, I did not succeed in playing mp3 files. This does not come totally unexpected, as many people seem to have trouble getting this module to work (… but then there are also many people who got it working …). It is a little sad, since this was such a cheap solution (aliexpress.com has this module for $0.51).
While I was able to read a text file from the SD card, I did not succeed in playing mp3 files. This does not come totally unexpected, as many people seem to have trouble getting this module to work (… but then there are also many people who got it working …). It is a little sad, since this was such a cheap solution (aliexpress.com has this module for $0.51).
But now I hope that I found an alternative solution with this “DFPlayer Mini” module.


Currently I am waiting for this to arrive from aliexpress.com (at $2.15 this is slightly more expensive – especially if you plan to use this in a number of other projects too).
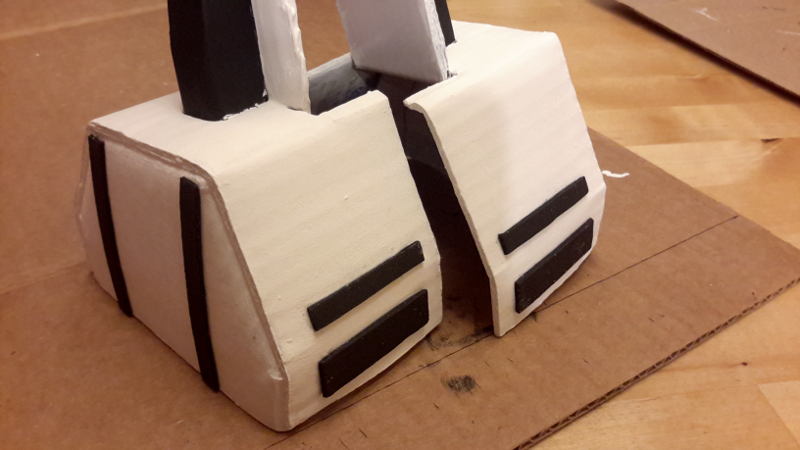
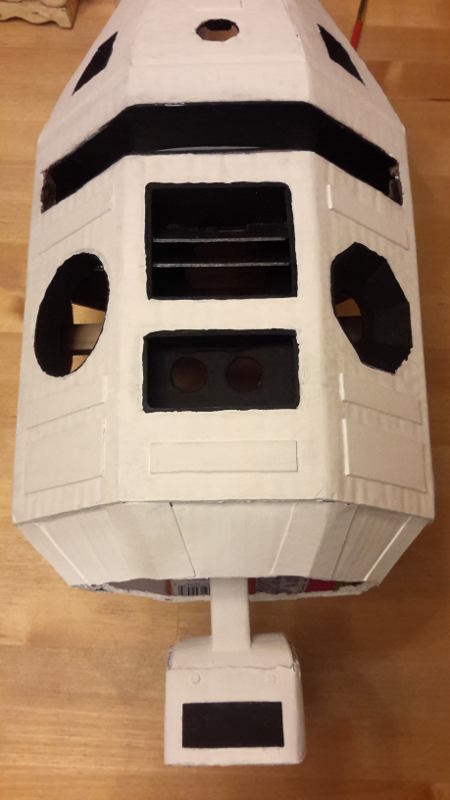
In the meantime, however, I made good progress with a few other droids: For my daughter I built another astromech, X7-OB (as requested: without motors, but maybe later with some lights and sounds), for my son I build a mousedroid MSE-6c, and then, in “The Force Awakens”, I noticed that new white droid on the Star destroyer, sentry droid H015, and I started that one too.



As if this wasn’t enough, I have now also started building a HAL 9000 replica – here is a first photo of the eye.

While there is still plenty of work to do with H015 and HAL, sooner or later all these projects will be waiting for the sound module. I really hope that I can get the DFPlayer module to work.